
Гуанчжоу, 7 декабря /Синьхуа/ -- Международная группа исследователей из Германии и Китая разработала робота с гибким позвоночником, способным выполнять боковое сгибание, что демонстрирует его повышенную маневренность по сравнению с другими существующими четвероногими роботами.
Исследование, посвященное разработке данного 40-сантиметрового робота по прозвищу NeRmo, конструкция которого имитирует строение и сухожильную систему настоящей мыши, было опубликовано в четверг в журнале Science Robotics.

Этот нейроробот, разработанный исследователями из Технического университета Мюнхена и Университета Сунь Ятсена, напоминает по своей форме мышь, а искусственные нейлоновые сухожилия позволяют устройству совершать маневренные и плавные действия, подобные движениям позвоночника.
Исследователи построили жесткий фронтальный корпус, оснащенный электроникой NeRmo, а также спинной позвоночник с четырьмя поясничными и боковыми суставами. Искусственные сухожилия в коленных и локтевых суставах дают роботу возможность двигаться практически как мышь, а также быстро поворачиваться.
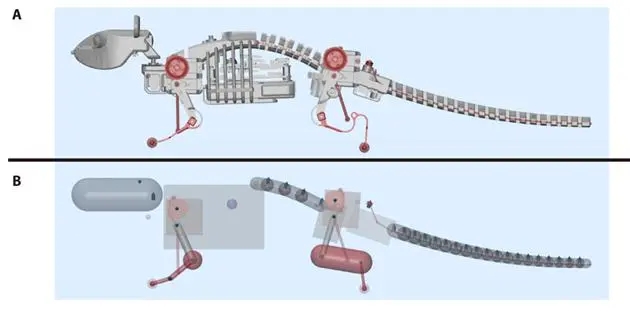
Робот весом 225 грамм имеет 13 режимов маневренности, позволяющих ему выполнять различные гибкие движения, включая вращение бедер и плеч, сгибание коленей и локтей, сгибание позвоночника в сагиттальной и боковой плоскостях, горизонтальное вращение и наклон головы, а также боковое сгибание хвоста.
Такая конструкция значительно повысила маневренность робота. Время, необходимое для нахождения выхода из лабиринта в рамках экспериментального задания, сократилось более чем на 30 проц. по сравнению с экспериментом, когда контроллер позвоночника был отключен.
"Гибкий позвоночник улучшает двигательные качества четвероногих в плане статической устойчивости, скорости ходьбы и поворотов. Наше исследование может улучшить понимание навыков передвижения четвероногих, основанных на движениях позвоночника, а также подсветить многообещающие концепции дизайна для разработки более подвижных роботов", -- сказал автор исследования Бин Чжэньшань.
(Редактор:Ян Цянь、Deng Jie) В ?китайской столице пионов? городе Хэцзэ производят фарфоровые пионы
В ?китайской столице пионов? городе Хэцзэ производят фарфоровые пионы В провинции Гуандун увеличен объем производства отопительных приборов
В провинции Гуандун увеличен объем производства отопительных приборов В синьцзянском городе Карамай самый разгар сбора хлопка
В синьцзянском городе Карамай самый разгар сбора хлопка Осеннее настроение на берегу озера Синкайху
Осеннее настроение на берегу озера Синкайху Умер единственный в Китае самец манула, содержащийся в неволе
Умер единственный в Китае самец манула, содержащийся в неволе Поделиться:
Поделиться: 


 主站蜘蛛池模板:
在线视频国产网址你懂的在线视频|
欧美福利视频网|
性xxxxfreexxxxx喷水欧美|
啊用力太猛了啊好深视频免费|
两个人在线观看的高清|
冬日恋歌国语版20集中文版|
国内自拍青青草|
久久精品国产亚洲精品2020|
欧美成人精品第一区|
亚洲欧美国产精品完整版|
亚洲欧美日韩国产精品久久|
аⅴ天堂中文在线网|
蜜芽亚洲av无码精品色午夜|
毛片让我看一下毛片|
亚洲成AV人片久久|
欧美一区二区三区久久久人妖|
桃花影院www视频播放|
天堂影院www陈冠希张柏芝|
亚洲影视自拍揄拍愉拍|
欧美激情一区二区|
天堂网在线最新版www|
中文字幕第35页|
成人妇女免费播放久久久|
91精品国产品国语在线不卡|
?1000部又爽又黄无遮挡的视频|
天天做天天爱天天爽综合网|
欧美zoozzooz性欧美|
三年片在线观看免费观看大全中国|
在线观看永久免费视频网站|
assbbwbbwbbwbbwbw精品|
冲田杏梨在线中文字幕全集|
日本bbwbbwbbw|
99国产精品永久免费视频|
狠狠躁夜夜躁人人爽天天天天97|
四虎影视在线观看永久地址|
视频一区视频二区制服丝袜|
j8又粗又硬又大又爽视频|
美女扒开胸罩摸双乳动图|
国产精品青草久久久久福利99|
最近最新2019中文字幕全|
99在线精品一区二区三区|
主站蜘蛛池模板:
在线视频国产网址你懂的在线视频|
欧美福利视频网|
性xxxxfreexxxxx喷水欧美|
啊用力太猛了啊好深视频免费|
两个人在线观看的高清|
冬日恋歌国语版20集中文版|
国内自拍青青草|
久久精品国产亚洲精品2020|
欧美成人精品第一区|
亚洲欧美国产精品完整版|
亚洲欧美日韩国产精品久久|
аⅴ天堂中文在线网|
蜜芽亚洲av无码精品色午夜|
毛片让我看一下毛片|
亚洲成AV人片久久|
欧美一区二区三区久久久人妖|
桃花影院www视频播放|
天堂影院www陈冠希张柏芝|
亚洲影视自拍揄拍愉拍|
欧美激情一区二区|
天堂网在线最新版www|
中文字幕第35页|
成人妇女免费播放久久久|
91精品国产品国语在线不卡|
?1000部又爽又黄无遮挡的视频|
天天做天天爱天天爽综合网|
欧美zoozzooz性欧美|
三年片在线观看免费观看大全中国|
在线观看永久免费视频网站|
assbbwbbwbbwbbwbw精品|
冲田杏梨在线中文字幕全集|
日本bbwbbwbbw|
99国产精品永久免费视频|
狠狠躁夜夜躁人人爽天天天天97|
四虎影视在线观看永久地址|
视频一区视频二区制服丝袜|
j8又粗又硬又大又爽视频|
美女扒开胸罩摸双乳动图|
国产精品青草久久久久福利99|
最近最新2019中文字幕全|
99在线精品一区二区三区|